We have employed our developed neural mechanisms and muscle models as useful building blocks (generalization and transferable) for signal processing and control of other systems.
Research highlishts
2021:
Learning-based multifunctional elbow exoskeleton control
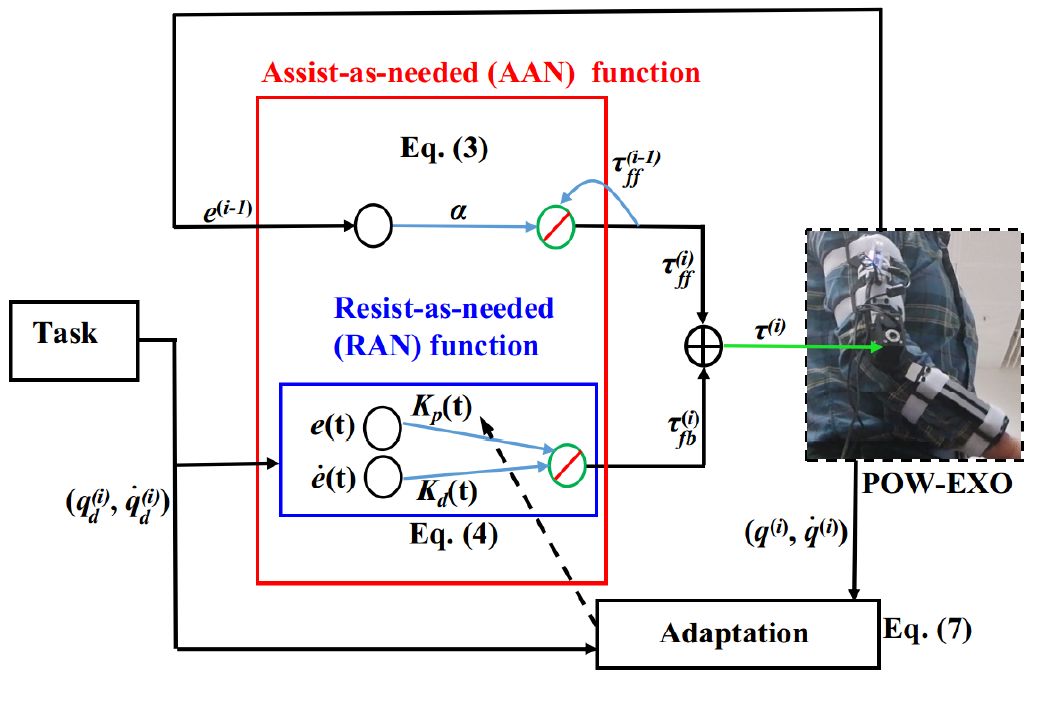
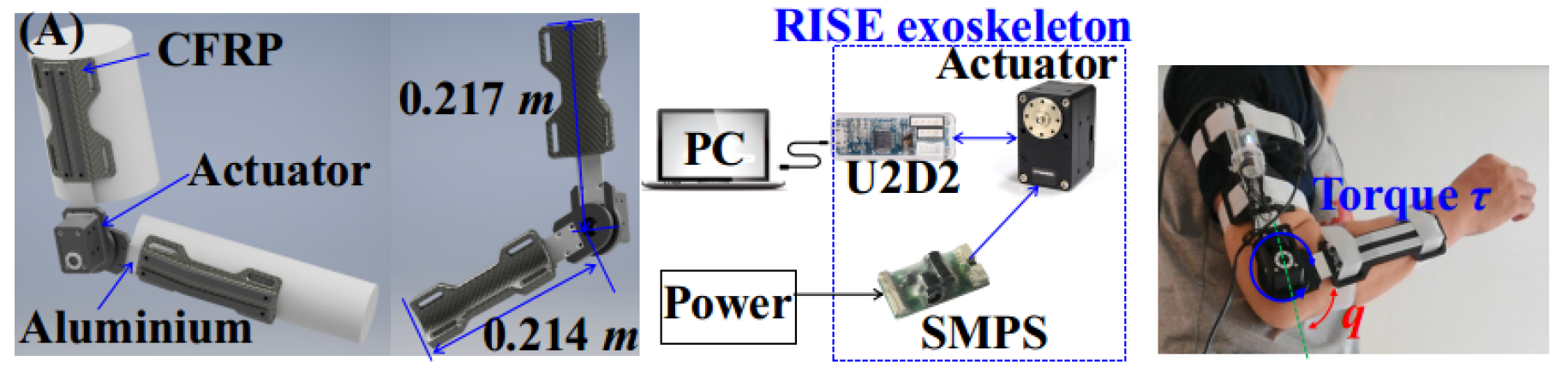
The study introduces a novel learning-based model for multifunctional elbow exoskeleton control (i.e., assist- and resist-as-needed (AAN and RAN)). The model was implemented on a lightweight (0.425 kg) and portable elbow exoskeleton (i.e., POW-EXO). The implementation relies only on internal pose (e.g., joint position) feedback, rather than physical compliant mechanisms (e.g., springs) and external sensors (e.g., electromyography (EMG) or force) typically required by conventional exoskeletons and controllers. The proposed model provides a unique technique to achieve a multifunctional exoskeleton system for assisting and resisting (stroke) patients in multi-stages of training. Interestingly, the approach may also reveal interactive (mechanical) impedance variance and invariance in human motor control. For more details see Xiong, X., Danh Do, C. Manoonpong, P. , IEEE Transactions on Industrial Electronics, 2021.
2020:
Resistance-as-needed (RAN) control for a wearable and soft hand exoskeleton
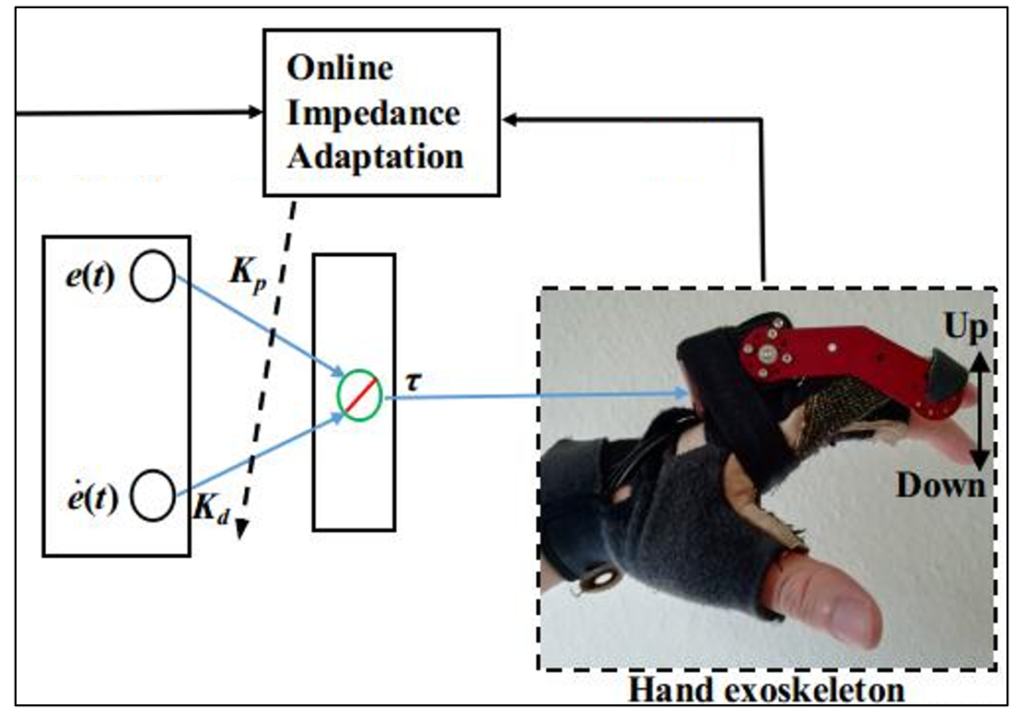
We propose an advanced RAN controller for a lightweight (i.e., 0.25 kg) and wearable hand exoskeleton. The RAN controller uses a human-like online impedance adaptation mechanism for compliance control of the exoskeleton. For more details see Xiong and Manoonpong, Gait & Posture, 2020.
2019:
Neural computational model GrowthEstimate: A model for studying living resources through digestive efficiency
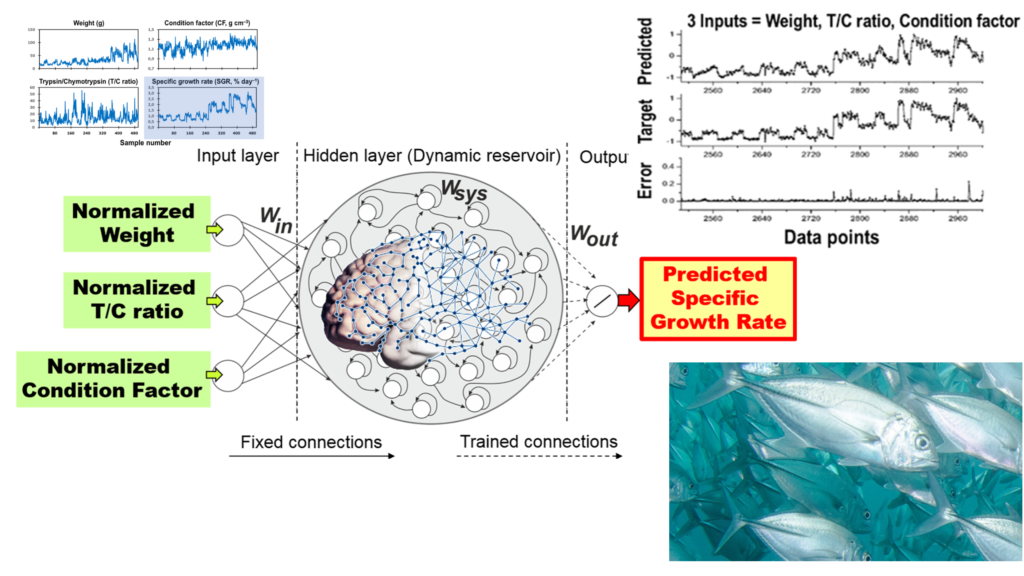
We transfer neural technology to predict the growth of fish. The developed neural model GrowthEstimate is exceptionally useful for the precise and comparable growth estimation of living resources at individual levels, especially in natural ecosystems where the studied individuals, environmental conditions, food availability and consumption rates cannot be controlled. It is a revelation and will help to minimize uncertainty in the wild stock assessment process. This will improve our knowledge in nutritional ecology, through the biochemical effects of climate change and environmental impact on the growth performance quality of aquatic living resources in the wild, as well as in aquaculture. The original GrowthEstimate software is available at GitHub repository (https://github.com/RungruangsakTorrissenManoonpong/GrowthEstimate) For more details see Rungruangsak-Torrissen and Manoonpong, PLOSOne, 2019.
Past:
EMG-based prosthetic hand control
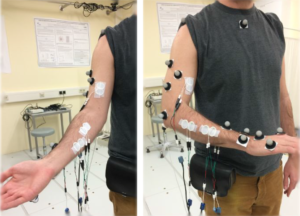
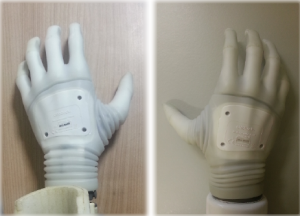
In collaboration with Dr. Massimo Sartori and Prof. Dr. Dario Farina (former Director) of the Institute of Neurorehabilitation Systems at the University Medical Center Göttingen, we have transferred and implemented the already demonstrated operational neural reservoir-based mechanism to the Michelangelo prosthetic hands of Ottobock. The neural mechanism acts as EMG signal processing with embeded internal memory. The preprocessed EMG signals are used to generate smooth and robust hand movements.
EEG-based robot control
We have developed a framework for brain – computer interface for robot control. The list of functionalities of the framework includes data acquisition, data processing, feature extraction and classification. The list is further extended with options for robot control and simulation due to the framework integration with the lpzrobots and gorobots software. The framework also can save, visualise and stream the acquired data because of its integration with ROS. As a proof of concept several experiments were performed with a single channel EEG device and a real hexapod robot. The experiments showed that the framework is able to demonstrate real robot control based on real EEG recordings as well as recording of neuron synchronisation and desynchronisation over the motor cortex area.
The result of the EEG-based robot control framework can be seen from this Video