Compliant and printable robot arm (GummiArm)
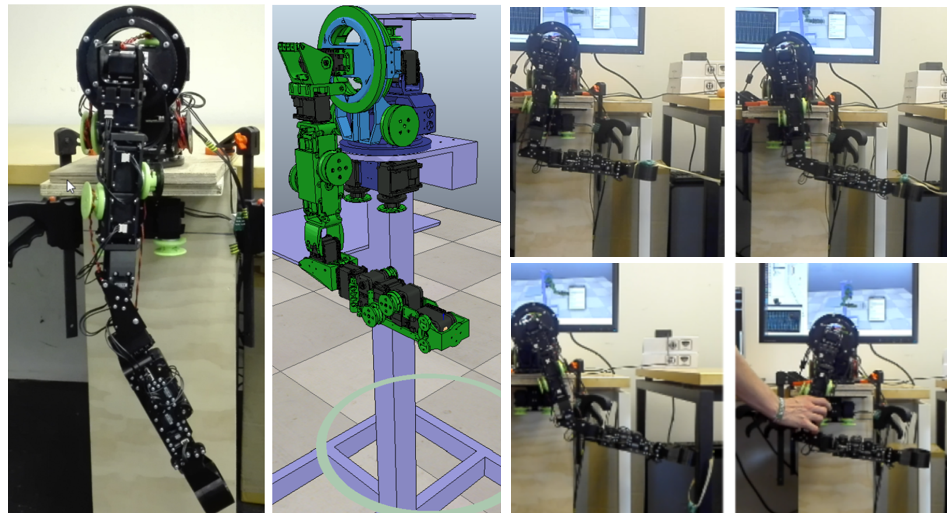
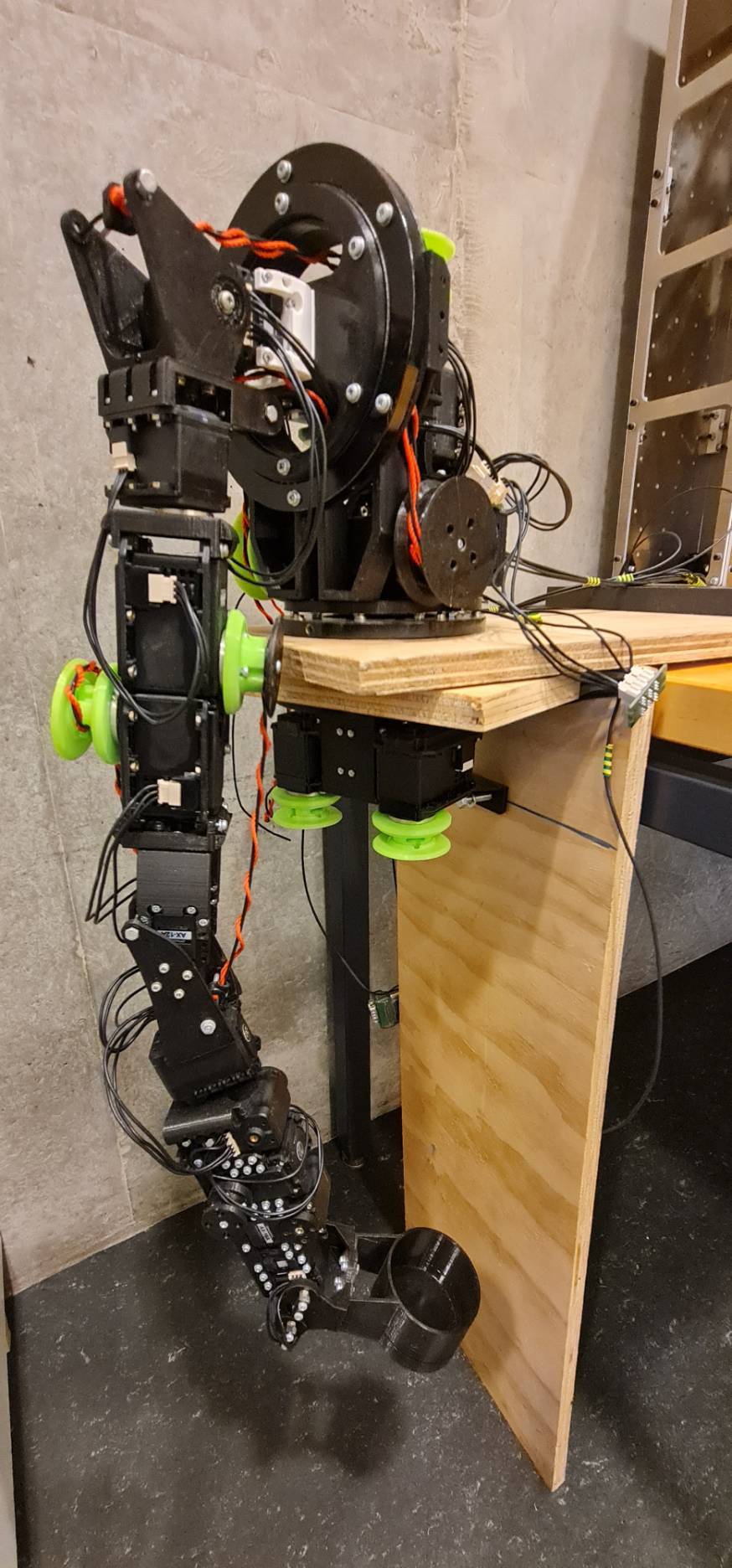
GummiArm has been developed by Associate Professor Martin F. (Stølen) Stoelen. We reproduced the arm and used it as our experimental platform with soft/compliant materials. The purpose of GummiArm is to operate in a compliant fashion, just like a human arm. GummiArm could be used to conduct repetitive human activities such as sawing, cutting, or placing/picking items on/from a conveyor belt in combination with human presence. To mimic human-like muscle compliance, GummiArm is designed in such a way that it inherently involves passive compliance. The passive compliance of GummiArm increases the coupling effects, which require a more sophisticated control approach in order to obtain good performance with efficient movement and adaptability as its human counterpart. From this point, we have investigated and developed adaptive neural control for the arm (For more details, see Degroote et al., ICONIP, 2020).