Research highlights
2020:
Low-cost, compact, sealed, three-axis force/torque sensor
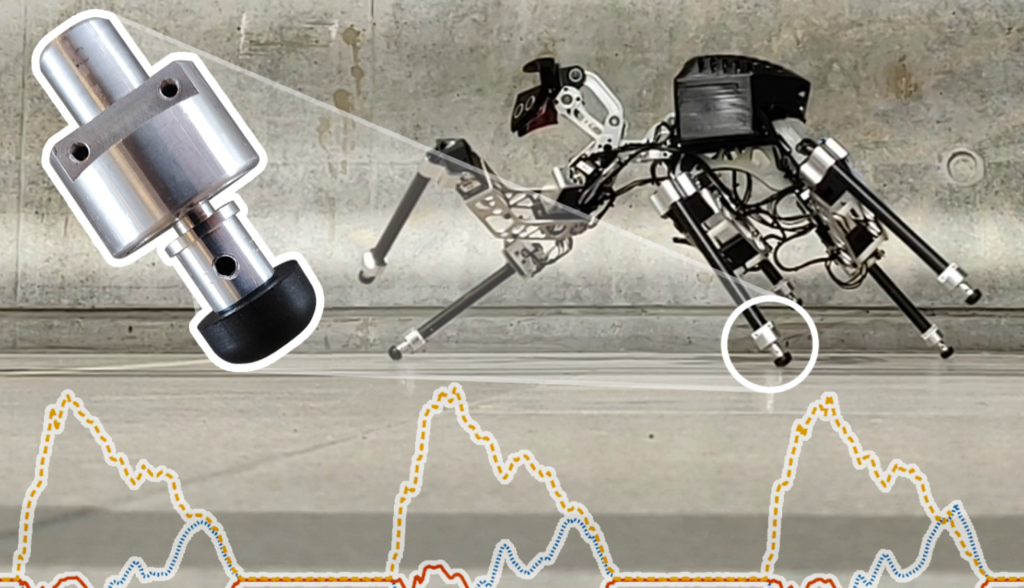
We introduce a new design for a three-axis force/torque sensor that is low-cost, compact, and hermetically sealed. It uses a single torsion full-bridge strain gauge in combination with onboard data processing. We demonstrate sensor design’s advantages in terms of error reduction without using Wheatstone bridges for all axes, and subsequently, the measuring accuracy in all angles. The sensor is suitable for applications such as foot sensors in walking robots. (see Billeschou et al., IEEE Sensors, 2021 and specification sheet for more details).
2017:
Simple and cheap foot sensor
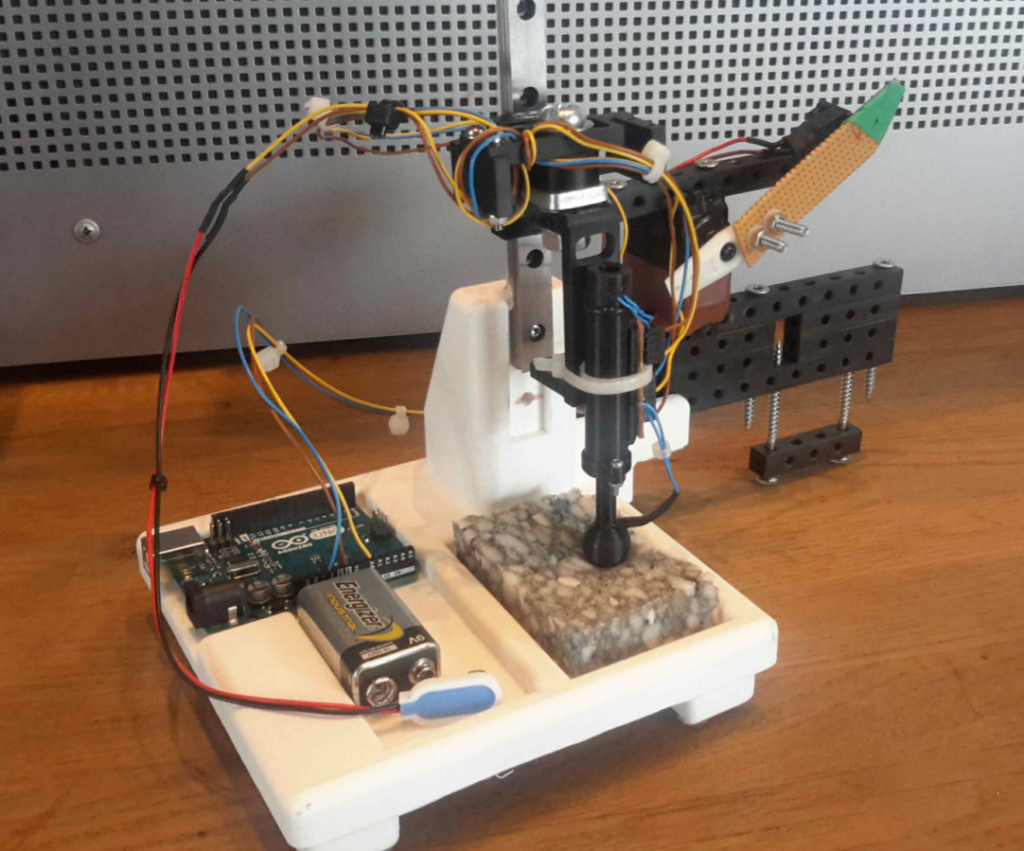

There are many types of foot sensors (e.g., force and pressure sensors) available for legged robots. Most of them are expensive or have hysteresis effects. We propose the design of a novel but simple and cheap foot sensor. The sensor uses a photoresistor and a light-emitting diode enclosed in a 3D printed cylindrical assembly separated by a spring. The sensor’s response can be adjusted by changing the spring stiffness. The sensor is based on a simple mechanism and uses a basic voltage divider circuit to obtain the output signal. Though the design of the sensor can be transferred to other systems, our initial design is targeted to the robotic toolkit, LocoKit, for monitoring walking behavior and detecting different types of surfaces. (see Saluja et al., SWARM 2017 for more details).