Research highlights
2022:
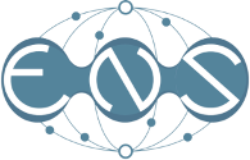
Self-solving Rubik’s Cube Robot
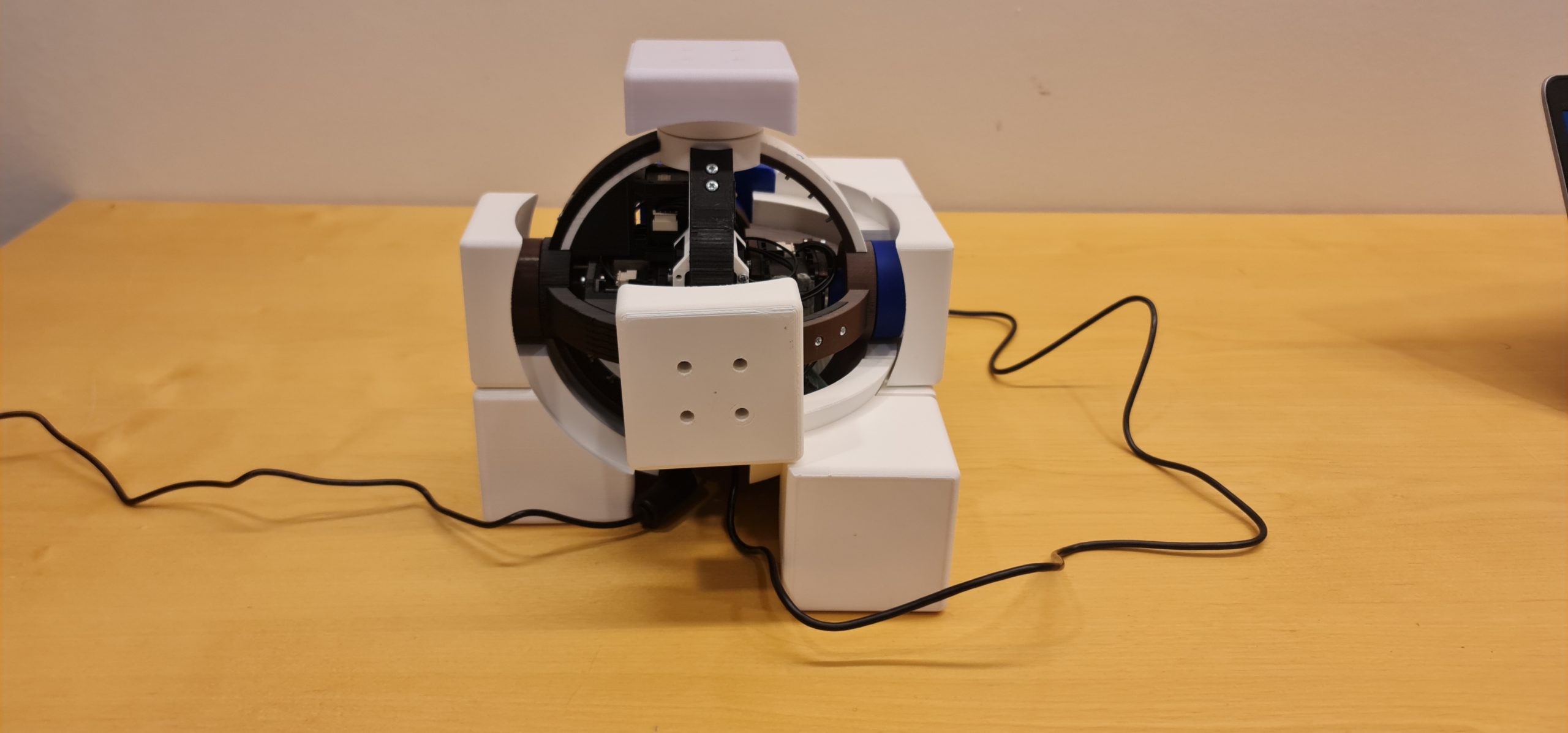
The work is done by our Bachelor’s student (Ida Blirup Skov). The robot with its complex mechanical structure captures a sequence of moves given either by a person or the program itself, to find its state, and from this state, it can utilize informed A* or IDA* search algorithms to reach a solved state through an optimal path. This path can then be followed from software, through the driver, to motors, to act out the solution on itself. Along with the physical representation is a simulated presentation of the Rubik’s Cube (video).
2021:
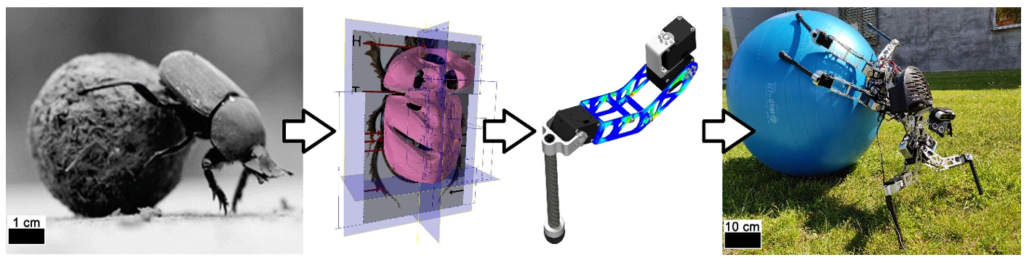
Fin ray crossbeam angles for efficient foot design for energy-efficient robot locomotion

The work, performed by an international research team from University of Southern Denmark, Christian-Albrechts-Universität zu Kiel, London South Bank University, Islamic Azad University, and Vidyasirimedhi Institute of Science and Technology, introduces insect-inspired robot technology that breaks with 25-year-old gripping technology – the result is creating international attention. They use an integrative approach, combining 3D printing with soft material, finite element modeling, and neural control, to 1) manufacture the insect-inspired robot foot/gripper structure with compliancy; 2) investigate the effect of the structure under different inner crossbeam angles, different loads, and different cylindrical substrates; and 3) finally demonstrate the use of the novel insect-inspired structure as robot feet for energy-efficient on-pipe locomotion and as robot grippers for fragile object grasping (video). For more details see Manoonpong et al., Advanced Intelligent Sys. 2021.
2020:
Framework for developing bio-inspired morphologies for walking robots
This work is performed in collaboration with the Functional morphology and biomechanics research group in Germany. We propose a framework for transferring animal morphologies to robots through detailed scans and kinematics and present how it can improve the movement versatility, dexterity, and durability of the robot in comparison to conventional designs. For more details see Billeschou et al., Appl. Sci. 2020.
Past:
Building blocks and modular structure of Locokit

The building blocks, are kept simple, in order to make each block light and cheap to produce. The building kit consists of the various modules for constructing different types of walking robot (see Locokit).