Research highlights
2020:
Adaptive neuromechanical control for robust behaviors of bio-inspired walking robots
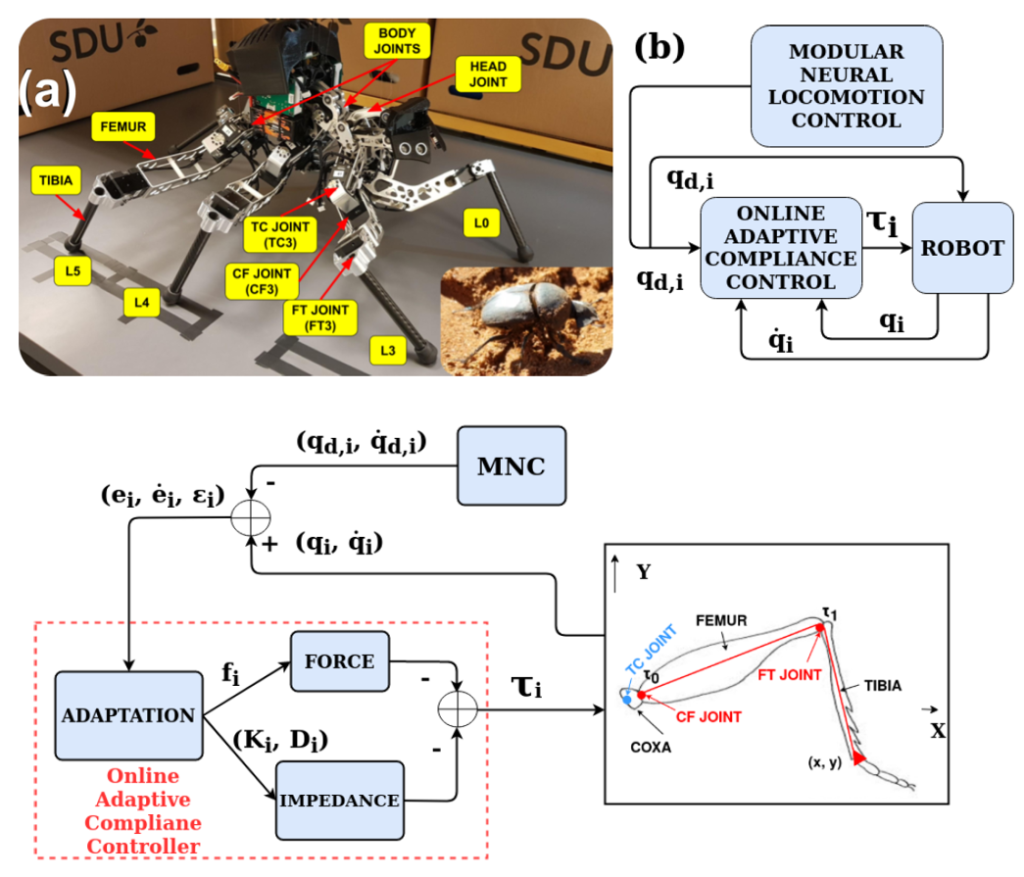
We propose adaptive neuromechanical control. It consists of two main components: Modular neural locomotion control and online adaptive compliance control. While the modular neural control based on a central pattern generator can generate basic locomotion, the online adaptive compliance control can perform online adaptation for joint compliance. For more details, see Huerta et al., ICONIP, 2020.
Past:
Virtual muscles for muscle-like behavior
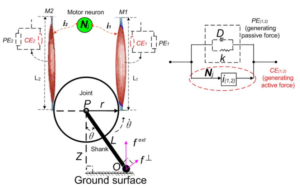
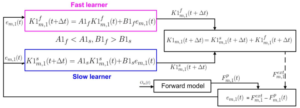
We have developed a simplified variable admittance controller applied to robot joint control. It is based on a virtual agonist-antagonist mechanism (VAAM) consisting of contractile and parallel elements (CEs and PEs). “Virtual” here means that every joint physically actuated by a standard servo motor can produce variably compliant motions as if it were driven by a pair of agonist and antagonist muscles. The muscles’ parameters for obtaining variable compliance can be adjusted manually and autonomously through sensorimotor learning. For more details, see Xiong et al.,IEEE Transactions on Cybernetics, 2016.