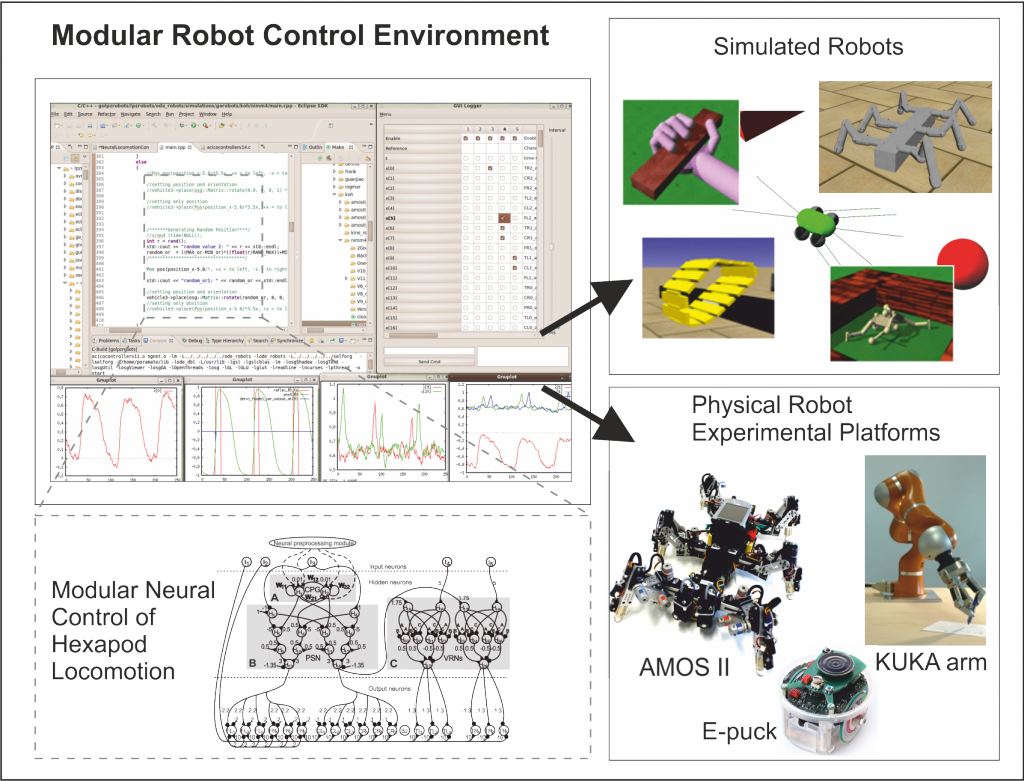
The MOdular RObot COntrol environment (MOROCO) and bio-inspired robot control technology rely on the C++ programming language and provide an artificial neural control network library. MOROCO is used to develop neural controllers for different robots. The very same controller code can now be tested in simulation and on real hardware, which allows speeding up the development process. The modular robot control environment also allows to exchange robots and controllers in a plug-and-play manner where parameters of the simulation and real robot can be observed and changed online. MOROCO is interfaced with LPZRobots, a physically realistic simulation toolkit, for simulating robots. MOROCO consists of two parts: Gorobots (containing robot control examples) and Lpzrobots (containing robot simulation) can be downloaded from GitHub or GitLab.
- Here is installation Guide for normal users
- Here is installation Guide for developers
- To run the simulation with Ubuntu 20
- V-REP shart tutorial
- 2D NEUROVIS
- 3D NEUROVIS
MOROCO has been initially developed at the Emmy Noether Research group for “Neural Control, Memory, and Learning for Complex Behaviors in Multi Sensori-Motor Robotic Systems” at Bernstein Center for Computational Neuroscience, Department for Computational Neuroscience, Third Institute of Physics-Biophysics, the University of Goettingen. The group was headed by Dr. Poramate Manoonpong. Note that Lpzrobots has been developed by Research Network for Self-Organization of Robot Behavior in Leipzig, Göttingen and Edinburgh
We have now integrated V-REP robot simulation (V-REP PRO EDU*) and ROS interface into MOROCO for education. For developers, here is an introduction of using V-REP and ROS interface in MOROCO (see also at Youtube). *V-REP PRO EDU is copyrighted by Coppelia Robotics GmbH
An overview of MOROCO can be seen at the pdf file and manual with FAQ.