ADvanced machine learning research platform for autonomous Lifelong learning of complex robotic systems in dynamically changing real-world environments (ADLife)
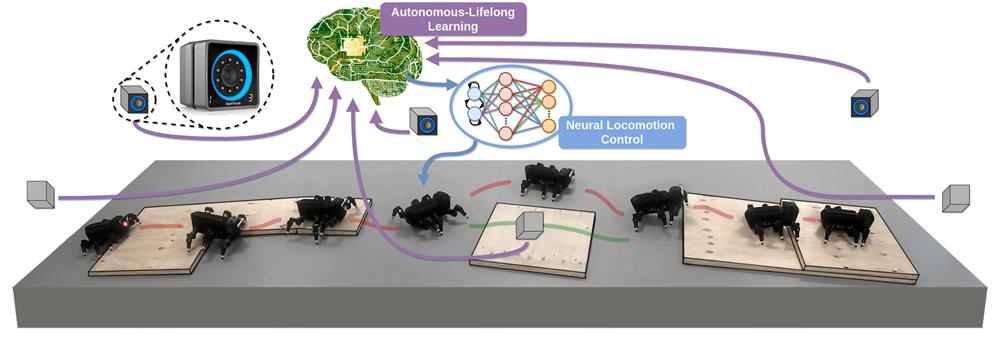
The aim of this ADLife project is to establish an advanced machine learning research platform to investigate and develop advanced machine learning methods for efficient and robust autonomous lifelong learning of complex limbed robots in dynamically changing real-world environments. The platform is equipped with:
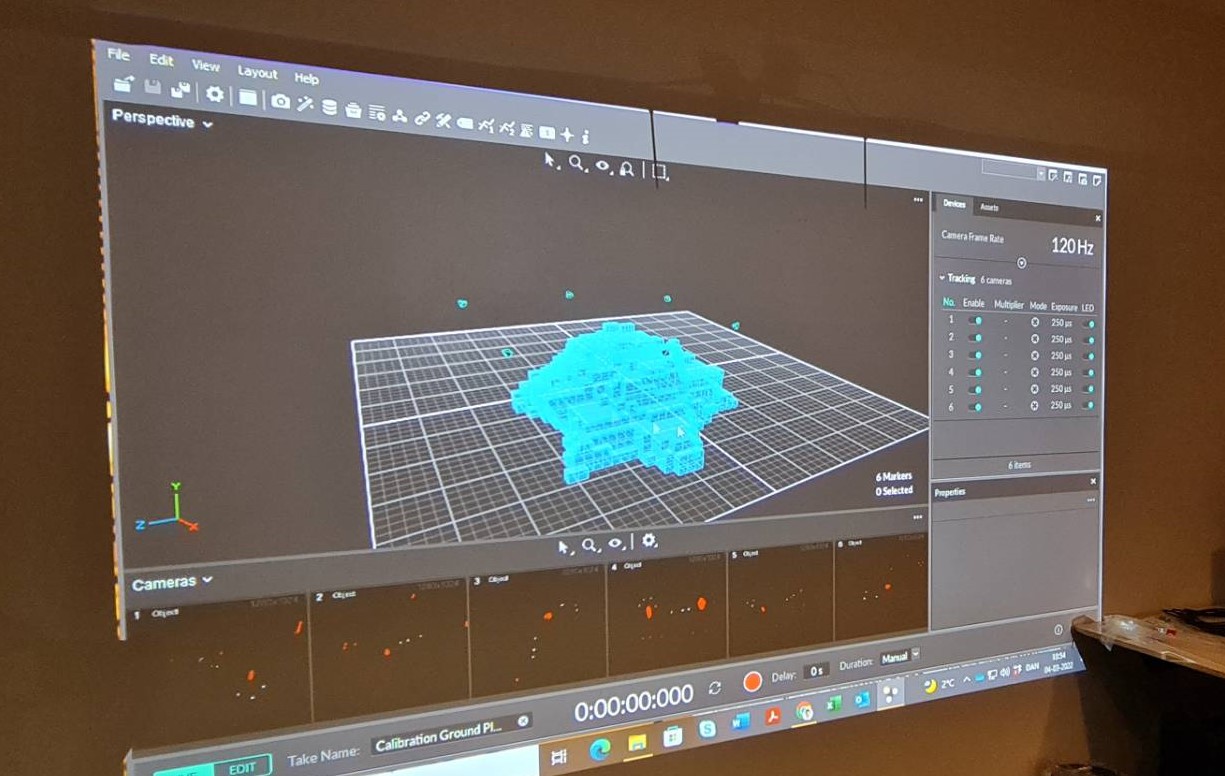
- a real-time robot motion tracking system with multiple low-latency and high-precision cameras (six PrimeX13 cameras, eSync 2, and software Motive:Tracker 3.X (Motive 3.0.0 Beta 3))
- a high-performance computer
- 2D NeuroVis (real-time neural information measurement and visualization)
- 3D NeuroVis (real-time neural information measurement and visualization)
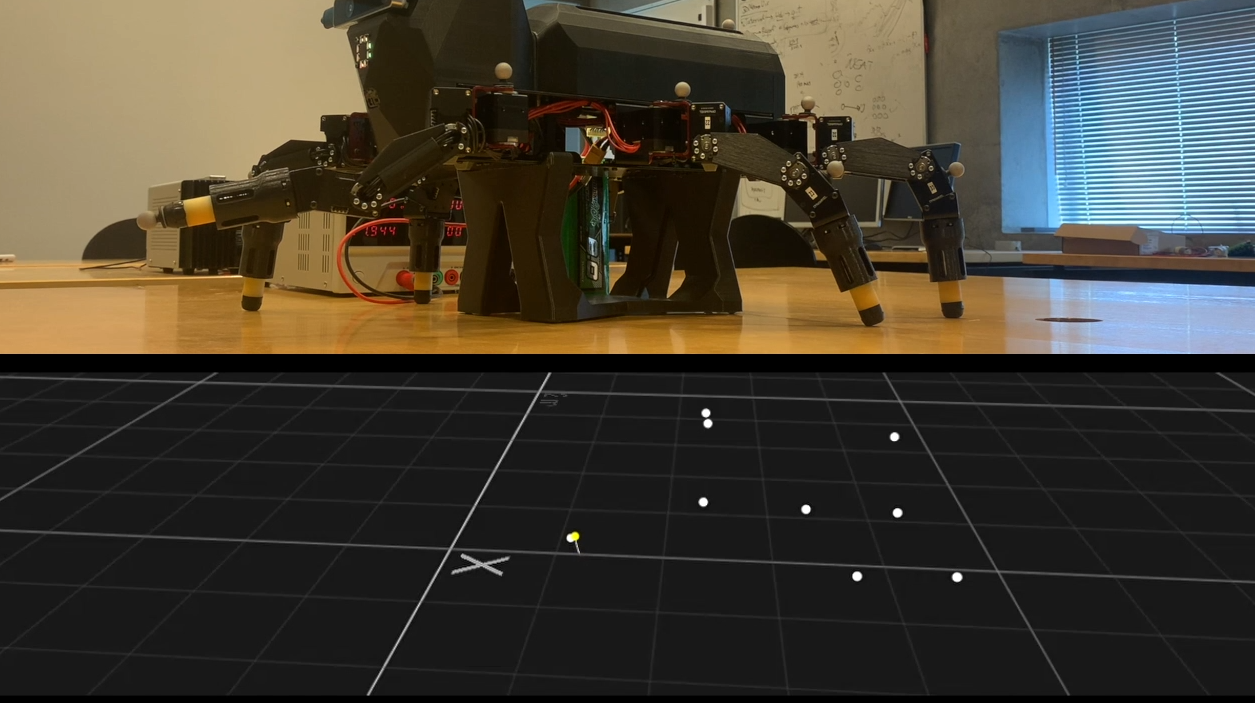
The system will allow us to track, analyze, and evaluate robot motion behaviors in real-time. The motion tracking information will be monitored for our analysis and transmitted to machine learning methods incorporating with neural robot locomotion control (implemented on the computer) for the autonomous lifelong learning process. At the same time, NeuroVis will visualize neural information of robot control and machine learning methods for deeply ananlysis.
The platform is setup in the ENS lab and can be used for bio-inspired robotics, human robotics, soft robotics, and swarm robotics research.
Real-time robot motion tracking system


NeuroVis (real-time neural information measurement and visualization)
Demonstrations using the platform for neural bio-inspired walking robots (bio-inspired robotics)
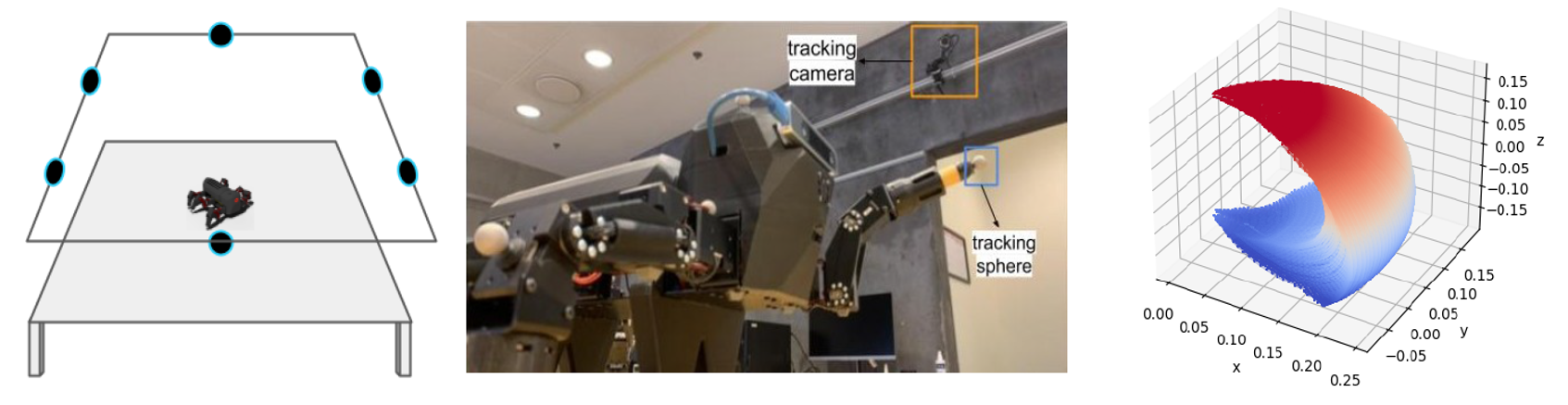
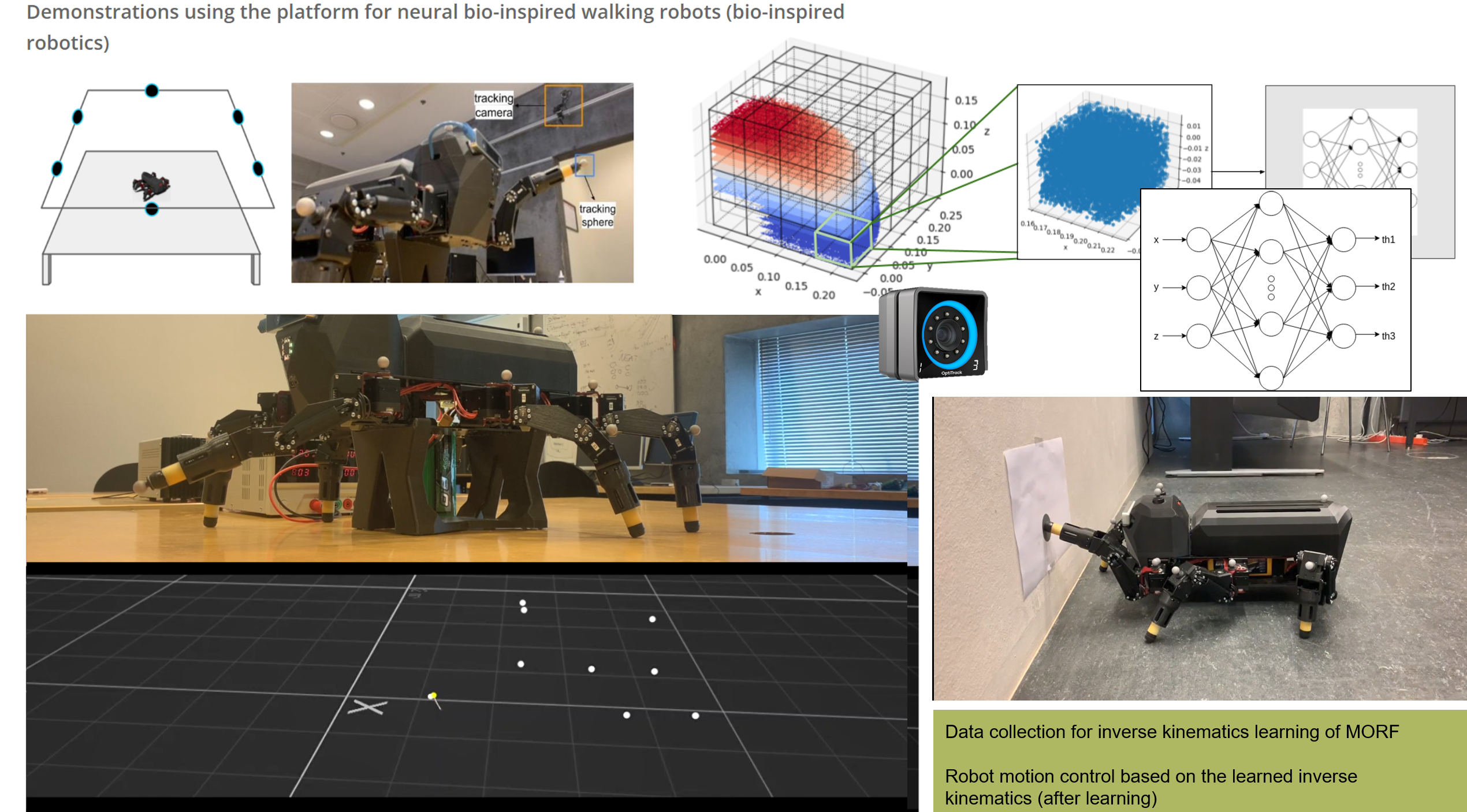
Data collection for inverse kinematics learning of MORF
Robot motion control based on the learned inverse kinematics (after learning)
The work is done by our exchange student (Leonor de Castro Gothen, Inverse kinematic control of a hexapod robot) under the Erasmus+ program.