Research highlights
2016:
Passive anisotropic scale-like material
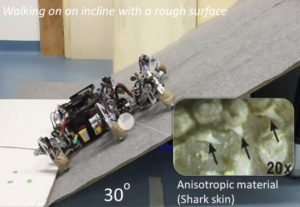
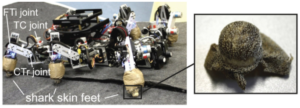
Based on the principles of morphological computation, we propose a novel approach that exploits the interaction between a passive anisotropic scale-like material (e.g., shark skin) and a non-smooth substrate to enhance locomotion efficiency of a robot walking on inclines. This work is in collaboration with the Functional Morphology and Biomechanics group of Prof. Dr. Stanislav Gorb at the University of Kiel. For more details, see Manoonpong et al., Scientific Reports, 2016.