Research highlights
2020:
Adaptive neural control for efficient rhythmic movement of a compliant robot arm
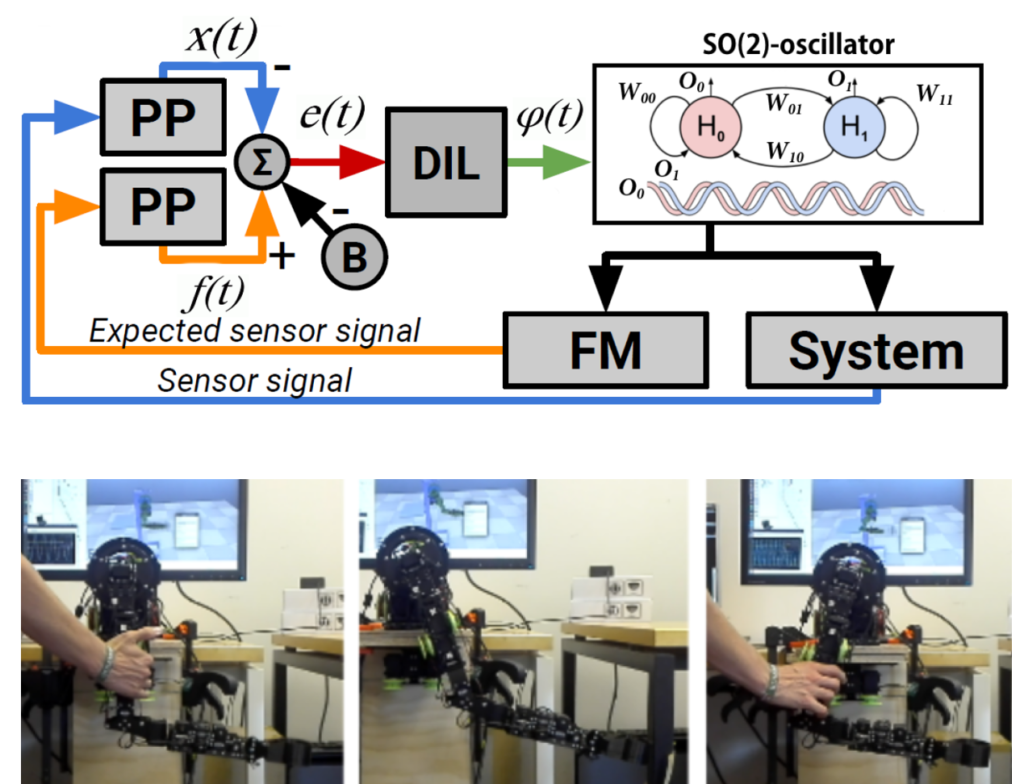
We propose an adaptive and simple neural control approach for GummiArm. The control approach is based on a minimal two-neuron oscillator network (acting as a central pattern generator) and an error-based dual integral learning (DIL) method for efficient rhythmic movement generation and frequency adaptation, respectively. By using this approach, we can precisely generate rhythmic end-effector movement for GummiArm
and allow it to quickly adapt its rhythmic motion to handle physical and environmental changes as well as interacting with a human safely. For more details, see Degroote et al., ICONIP, 2020.
Adaptive neural CPG-based control for a soft robotic tentacle
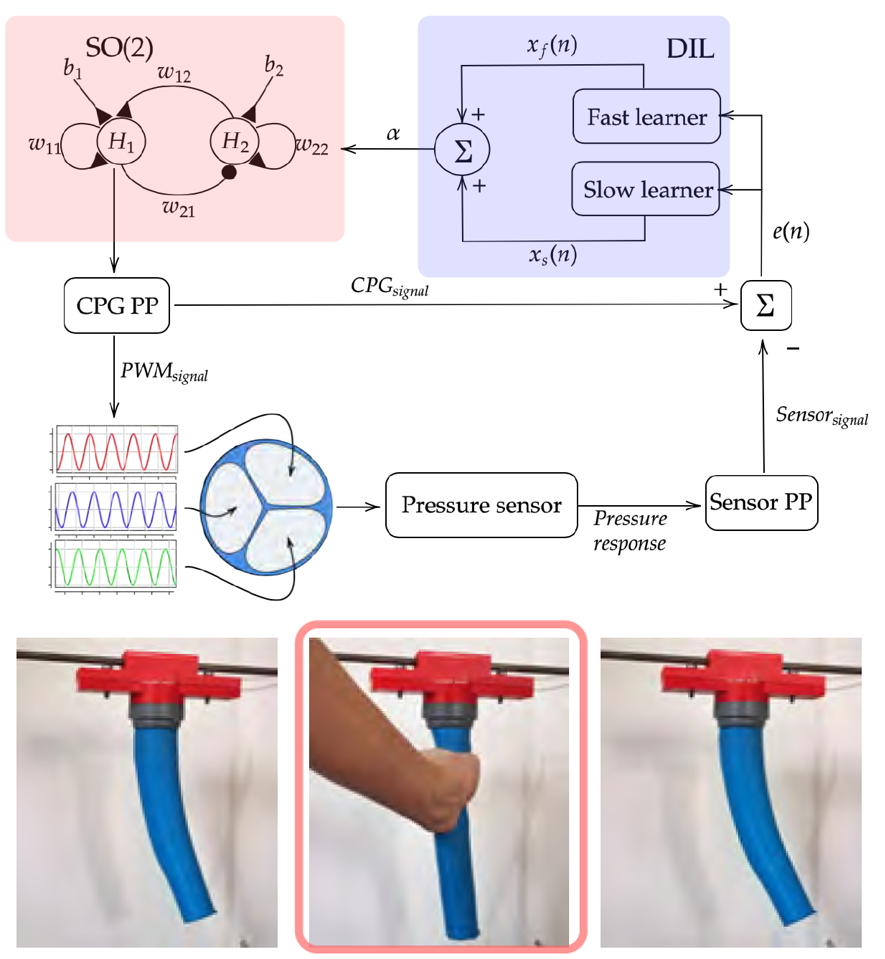
We propose a neural central pattern generator (CPG) based control architecture using an amplitude adaptive oscillator for the movement of a low-cost, pneumatically actuated soft robotic tentacle with three air chambers. This work is in collaboration with Assist. Prof. Jonas Jørgensen from SDU Center for Soft Robotics. For more details, see Jeppesen et al., ICONIP, 2020.
2016:
Modular CPG-based neural control
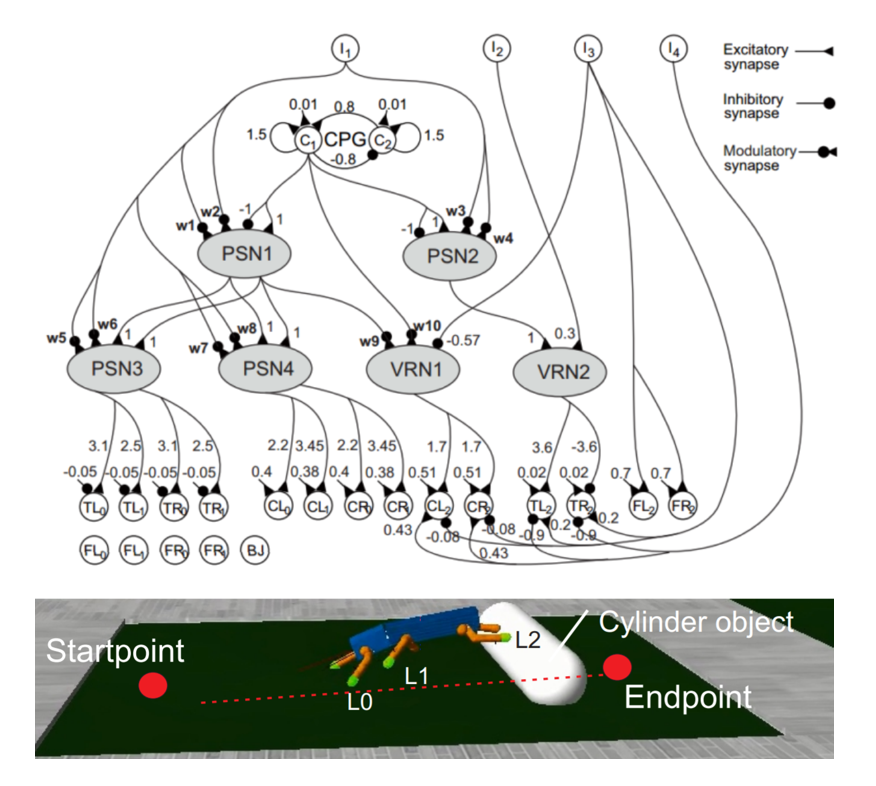
We develop modular neural control for bio-inspired object manipulation of a hexapod robot. The controller utilizes discrete-time neurodynamics and consists of seven modules based on three generic neural networks. One is a neural oscillator network serving as a central pattern generator (CPG) which generates basic rhythmic patterns. The other two networks are so-called velocity regulating and phase switching networks. They are used for regulating the rhythmic patterns and changing their phase. A combination of these modules enables the hexapod robot to walk and climb a cylinder object, generates different hind leg movements to manipulate the object (i.e., pushing and rolling) and transport it. For more details, see Sørensen and Manoonpong, SAB, 2016.