MOdular Robot Framework – MORF

We developed MORF, a MOdular Robot Framework, that can be used in a wide range of studies. The primary aim of MORF is for it to be easy and convenient to use, such that researchers can focus more on the actual controller of the robot and not the hardware. Its design makes use of bio-inspired kinematics and state-of-the-art components to achieve high performance. This enables some of the complexity to be moved from the controller to the mechanics of the system.
MORF is modular as it defines standards that can be used for re-configuring, extending, and/or replacing parts of the robot, e.g. body shape. MORF can, for example, be configured either as an insect or a mammal. MORF furthermore includes a software suite with a full simulation of the robot (see the link for more details).
The performance of MORF can be seen at the video.

BlueMORF is developed based on the MORF framework. It is for human-robot communication research.
AMOSII
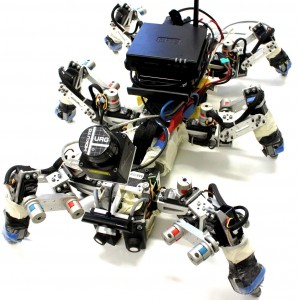
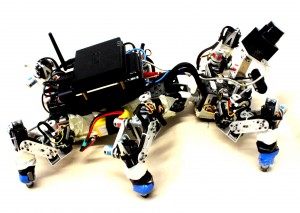
AMOSII(Advanced Mobility Sensor Driven-Walking Device version II) is a new version of AMOS. It is a biologically inspired hardware platform. It was developed in collaboration between Fraunhofer Institute for Intelligent Analysis and Information Systems IAIS and the Computational Neuroscience Group of Prof. Woergoetter. It is used to study the coordination of many degrees of freedom, to perform experiments with neural control, memory, and learning and to develop artificial perceptionaction systems employing embodied control techniques. AMOSII can carry a maximum payload of 6 kg while walking. The size of AMOSII is 30 cm wide, 40 cm long, 20 cm high. AMOSII has a number of proprioceptive and exteroceptive sensors, e.g., angle sensors, force sensors, current sensors, light sensors, infrared sensors, ultrasonic sensors. These sensors allow AMOSII to autonomously perform a broad behavioral repertoire including foothold searching, elevator reflex (swinging a leg over obstacles), self-protective reflex (standing in an upside-down position), obstacle avoidance, escape responses, phototaxis (turn towards a light source), climbing over obstacles, and five different gaits. Furthermore it can learn to adapt its walking pattern to a new situation.
The performance of AMOSII can be seen at AMOSII page.