RuBi
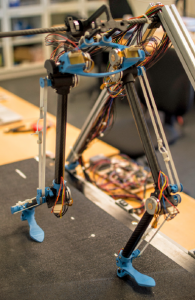
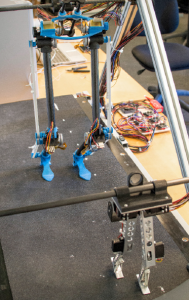
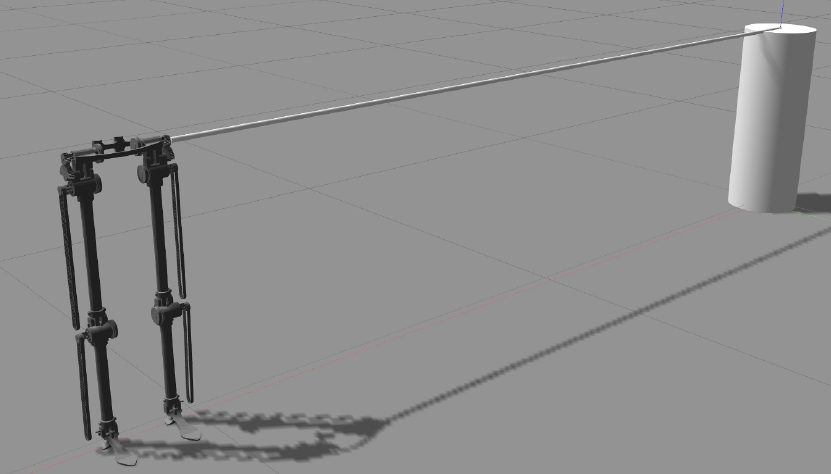
The running bipedal robot RuBi is a human-inspired, compliance-reconfigurable and low-cost bipedal platform for research in human-like walking and running gaits control. It consists of 3 active joints per leg with SEA and PEA actuators. It has various proprioceptive sensors (e.g., joint angles, foot contacts, current sensors) for locomotion control. Its reliable hardware structure and actuation system and a robust software frame are able to offer all the needed functionalities.